Structured real-world data built to improve physical policy models
Domain-specific human input used to capture and structure data in real world environments
.webp)
.avif)
.avif)
Our approach
.avif)
Expert-demonstrated data
Structured POV and third-person capture of domain experts performing real-world tasks across specialized environments and hardware modalities.
.avif)
Dataset Structuring & Enrichment
Transform raw robotics data into structured training data with labeling, tracking, 2D/3D annotation, QC, and evaluation.
.avif)
Full-Stack Deployment Lab
Data factory with controlled robotics environments where we deploy robots, capture interaction data, run QC, post-process outputs, and evaluate performance end-to-end.
Use cases
High-quality human data fuelling robotics in home and commercial settings
.avif)
Action-Level Manipulation Annotations
Generate dense action-level annotations for robotics video data, including temporal segmentation, hand/object interactions, and step-by-step natural language labels optimized for VLA training and evaluation.
Human Demonstration Pipelines
Capture high-quality human demonstrations across household, industrial, and task-oriented environments to support manipulation learning and robotics research.
.avif)
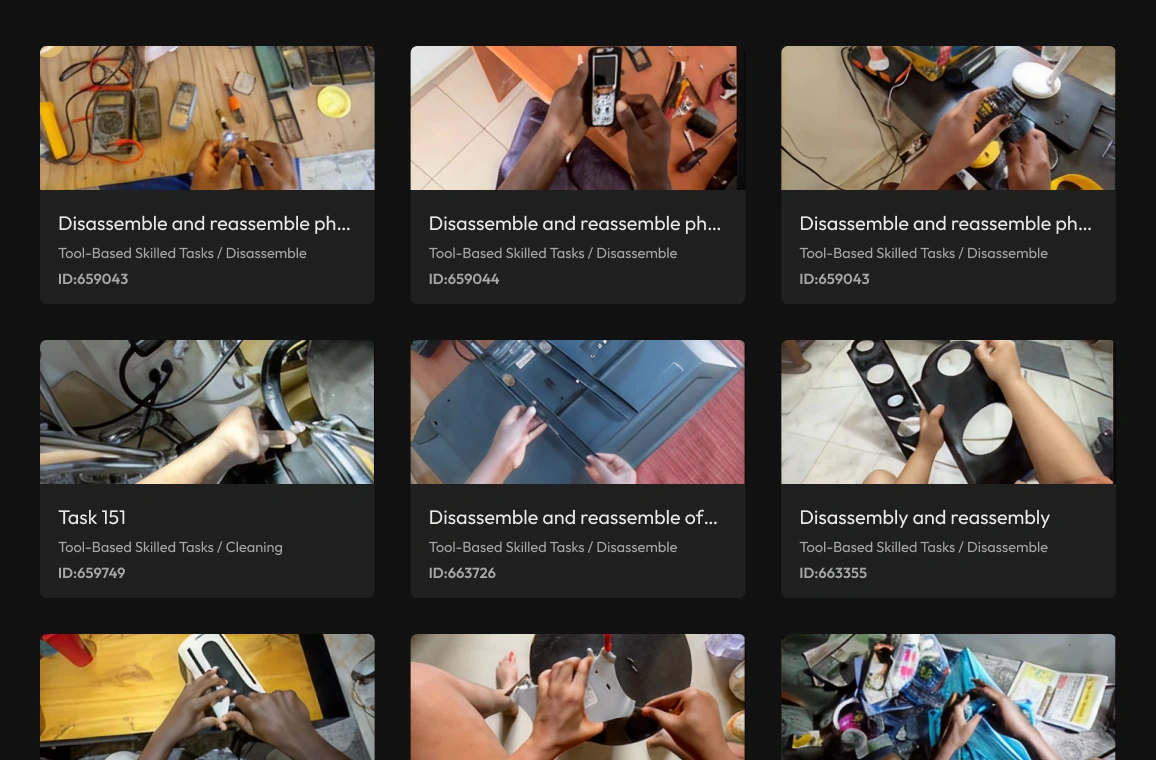
Expert Environment Datasets
Collect demonstrations from skilled experts in real-world environments including repair, assembly, industrial workflows, logistics, field operations, and more.
Multimodal Capture Pipelines
Collect synchronized stereo video, IMU, and multi-camera data for manipulation, motion understanding, and embodied AI research.
.avif)